이 단원에서는 구름저항, ABS 그리고 휠 모델에 대해서 설명드리겠습니다.
2.1 - Rolling Resistance (구름저항)
구름저항 (Rolling Resistance)은 타이어의 변형과 주로 타이어의 변형과 마찰을 통한 에너지 소산으로 인해 발생합니다. 단단한 포장 도로의 저속에서 구름 저항은 주요 운동 저항력입니다. 실제로 공기역학적 저항은 80-90km/h의 속도에서 구름 저항과 같아집니다.

여기서 G는 중력가속도를 나타내고, F_r은 차량 속도의 다항식 함수로 표현되는 구름 저항 계수입니다.

근사값:


그림은 림 직경이 12-16인치 인 다양한 자동차 타이어의 구름 저항 계수를 보여줍니다. 약어의 첫 글자는 각 타이어 유형의 허용 속도 범위를 나타냅니다(S: ~ 180km/h 까지, H: ~ 210km/h 까지, V: ~ 210km/h이상). 두 번째 문자는 타이어 유형을 나타냅니다(R: 래디얼 타이어 M + S 타이어는 진흙 및 눈).
2.2 - ABS
다음 그림은 보쉬사의 ABS 시스템을 나타냅니다.
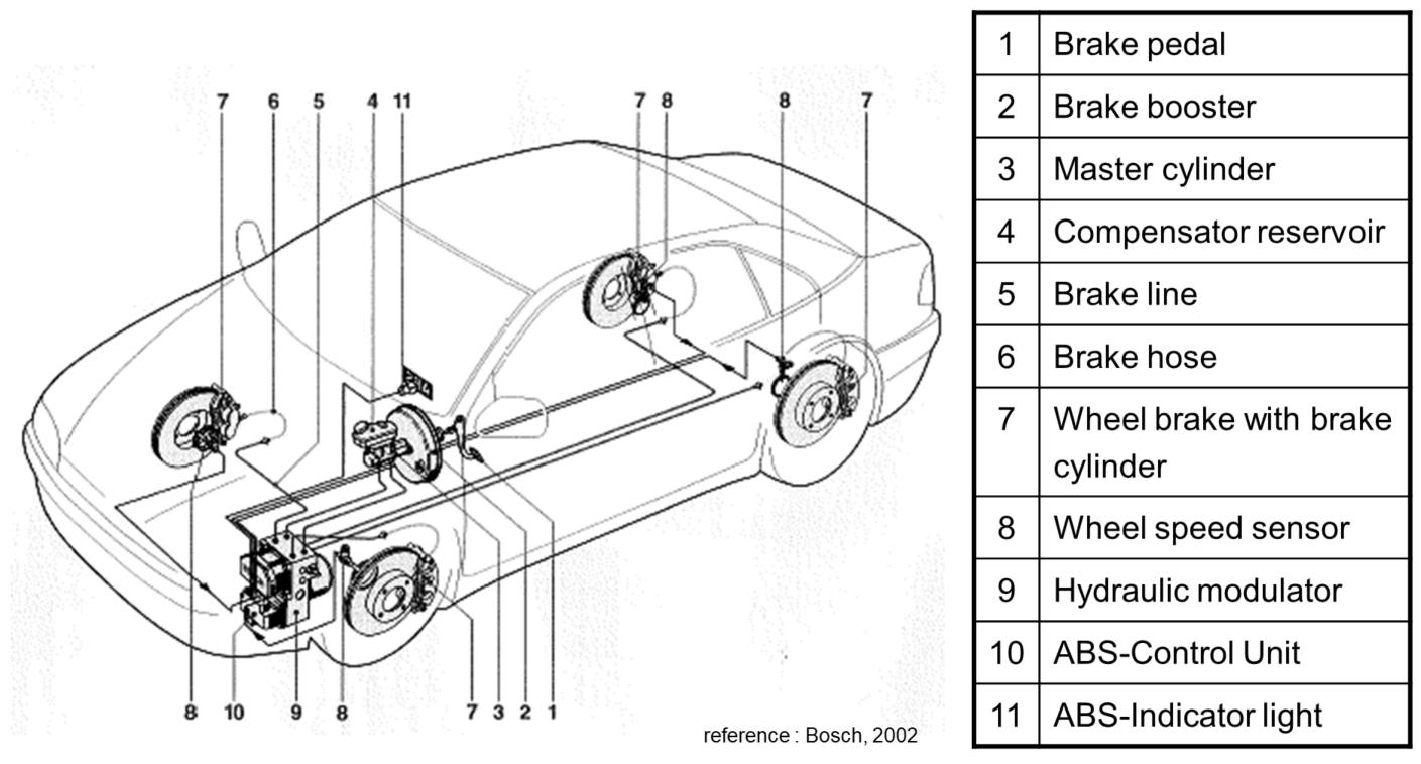
1:브레이크 페달, 2:브레이크 부스터, 3:마스터 실린더, 4:서지 탱크, 5:브레이크 라인, 6:브레이크 호스, 7: 휠 실린더가 있는 휠 브레이크, 8: 휠 속도 센서, 9: 유압 장치, 10: ABS 제어 장치, 11: ABS 표시등

위 그림은 두가지 ABS 시스템을 나타낸다. 제시된 모델에서 제동작동은 4륜에 제동 토크를 사용하여 모델링됩니다. 이러한 모델링은 오늘날 자동차 abs를 실제로 구현한 모습입니다. 제동력 분포, 차량 구동 개념, 기능 요구 사항 및 비용 고려 사항에 따라 다른 여러 작동 종류가 있습니다. 그림은 현 시장에서 가장 널리 퍼진 시스템 변형인 4채널 시스템(변형 1, 2)을 보여줍니다. 이러한 시스템을 통해 앞/뒤(||) 및 대각선(X) 브레이크 회로 분배에 대한 휠 브레이크 압력을 개별적으로 조절할 수 있습니다. 그러나 비대칭 차선에서 제동 시 요 모멘트(차량 수직축을 중심으로 하는 제동 토크)가 주행 안정성을 위협하지 않도록 전륜은 개별적으로 제어하고 후륜은 "저속 선택" 방식으로 제어합니다 . (마찰 계수가 낮은 뒷바퀴는 두 뒷바퀴의 공통 브레이크 압력을 결정합니다)

ABS(잠김 방지 제동 시스템)에는 휠 속도 센서가 장착되어 있으며, 이를 통해 휠 속도 v_R 와 휠 가속도를 측정할수 있습니다. 그 뿐만 아니라, 추정기를 통해 차량 속도(v_Ref)를 결정할 수 있습니다. 이러한 측정값들을 통해 휠 슬립률을 결정할 수 있습니다. 제동이 시작되면 ABS는 처음에 수동적입니다(1단계). 제동 압력 축적은 휠 슬립 또는 휠 가속이 임계값을 초과할 때 중지됩니다(2단계). 슬립이 계속 증가하면 허용 가능한 휠 가속 값이 설정될 때까지 휠 브레이크 압력이 감소합니다(단계 3). 4단계에서 휠 가속도는 휠에 사용된 접착력 값과 사용 가능한 접착력 값 간의 차이를 측정할 수 있기 때문에 관찰됩니다. 높은 양의 휠 가속도의 경우, 현재 휠을 가속하는데 사용한 접착력과 사용 가능한 접착력 값 사이에 큰 차이가 있다는 결론을 내릴 수 있습니다. 따라서 ABS는 휠 가속이 다시 떨어질 때까지 압력을 축적하기 시작합니다(5단계). 휠 가속도가 차량 가속도에 해당하는 값으로 떨어진 후(단계 6), 브레이크 압력이 여러단계로 점진적으로 증가하빈다(단계 7). 이후 매우 낮은 휠가속도 임계점에 도달하면 브레이크의 압력은 다시 감소됩니다 (단계 8).
ABS 제어의 중요한 부분은 외란값을 강건하고 정밀하게 제어하는 부분에 있습니다. 바퀴 원주 속도는 도로 프로파일(예: 의도적으로, 평평하지 않은 노면에서의 속도 감소) 및 편향의 결과로 영향을 받습니다. 다른 외란은 동적 휠 하중입니다. 일정한 마찰 계수와 일정한 브레이크 압력에서 동적 휠 하중이 너무 낮으면 휠이 잠길 수 있으며, 잠시 후 휠 하중이 크게 증가하면 잠재적인 힘의 일부만 사용 될 수 있습니다. 지금까지 설명된abs 시스템 로직은 실제 abs모델 구현에 대한 예입니다. 실제 현실과 모델링에서 다른 변형도 또는 외란들을 생각할 수 있으나, 이 시점에서 더 자세히 알아보지는 않도록 하겠습니다.
2.3 - Wheel Model (휠 모델)

휠에 대한 회전 운동방정식을 알아보면, 위 그림처럼 정의 될수 있습니다. 여기서 좌항에는 관성 모멘트인 J와 각가속도가 있음을 알수 있고, 우항에는 구동 토크, 제동 토크, 구름 저항 모멘트, 동적 구동 모멘트(접지력*휠 동적반경)가 있습니다. 이러한 일반적인 운동방정식을 abs모델을 위한 운동방정식을 만들기위해 다음과 같은 조건을 추가합니다. 여기서 휠이 구동되지 않을경우에는 구동토크가 0이 되고, 구름저항 모멘트는 제동토크보다 값이 무지 작기 때문에 생략할수 있습니다. 이러한 조건을 통해 기존의 운동방정식을 다음과 같이 간소화 할수 있습니다. 간소화된 운동방정식을 이용해 abs시스템을 제어 할 수 있습니다.

간소화된 방정식은 크게 3가지로 나눠질 수 있는데, 시스템 역학, 컨트롤러 결과값 그리고 외란값 입니다. 일반적으로 미분방정식은 라플라스 변환을 이용해 쉽게 해를 찾을 수 있습니다.

따라서 위에서 소개된 운동방정식은 위 그림처럼 주파수영역 대수방정식으로 간단히 정리 할 수 있습니다.

위 그림은 abs 제어모델을 간단하게 보여주고, 더불어 라플라스 변환후의 주파수 영역의 개루프 전달함수를 보여줍니다. 제어는 대해서는 따로 다루지 않도록 하겠습니다. 개루프, 폐루프 전달함수에 대해서 공부해보시기 바랍니다. 일반적으로 제어에서 우리는 무슨 물리적값을 제어할 지 생각할 필요가 있습니다. abs작동을 위해 특정 슬립값을 목표로 정했다면, 원래 목표였던 슬립 제어는 시작전 간단한 공식을 통해 휠의 회전속도값으로 제어할 수 있습니다.

위 그림은 단순화한 abs 제어모델의 예시입니다. 이 모델은 크게 제동 토크 제어, 휠 속도 제어 그리고 자동차 속도 제어 3가지로 나눠져 있습니다. 여기서 견고하고 강건한 모델링을 위해서는 제동 토크 제어 시스템을 제어할 필요가 있습니다(휠 회전속도나 자동차 속도에 비해서 더 정확도가 높음). 여기서 제동 토크 제어 시스템은 폐루프 제어이며, ABS 시스템의 초기 목표 제동 토크와 실제 제동 토크를 비교하면서 제어할 수 있습니다.
출저: Ride and Handling, Automotive engineering in Darmstadt, TU Darmstadt, Germany
'자동차공학' 카테고리의 다른 글
| 차량동역학 [1/4차량모델 (Quarter-Car Model)] (0) | 2023.01.19 |
|---|---|
| 차량동역학 [타이어] (0) | 2023.01.10 |

